第10週目標:
兩段式六連桿提球機構設計與模擬
下載 Pyslvs:
http://wcmg3.kmol.info/downloads/pyslvs-18.4.0.mscv1900-amd64_cdw10.7z
在 W11 上課之前完成 Pyslvs 套件中之 ball lifter 機構的 Solvespace 零件組立與 V-rep 提球模擬
在各組倉儲中繳交 cd_w11_ag1.slvs 零件組立檔、cd_w11_ag1.pyslvs 機構模擬檔與 cd_w11_ag1.ttt 提球模擬檔
在 W11 上課前, 必須拍攝利用此一雙階段提球機構, 將球送到各組目前既有的軌道模組循環運行至少兩次的模擬影片
延伸加分題
能否利用 Pyslvs, 在此一兩組六連桿機構, 再疊加一組六連桿機構, 成為三段式提球機構設計?
stl檔案
pyslvs檔案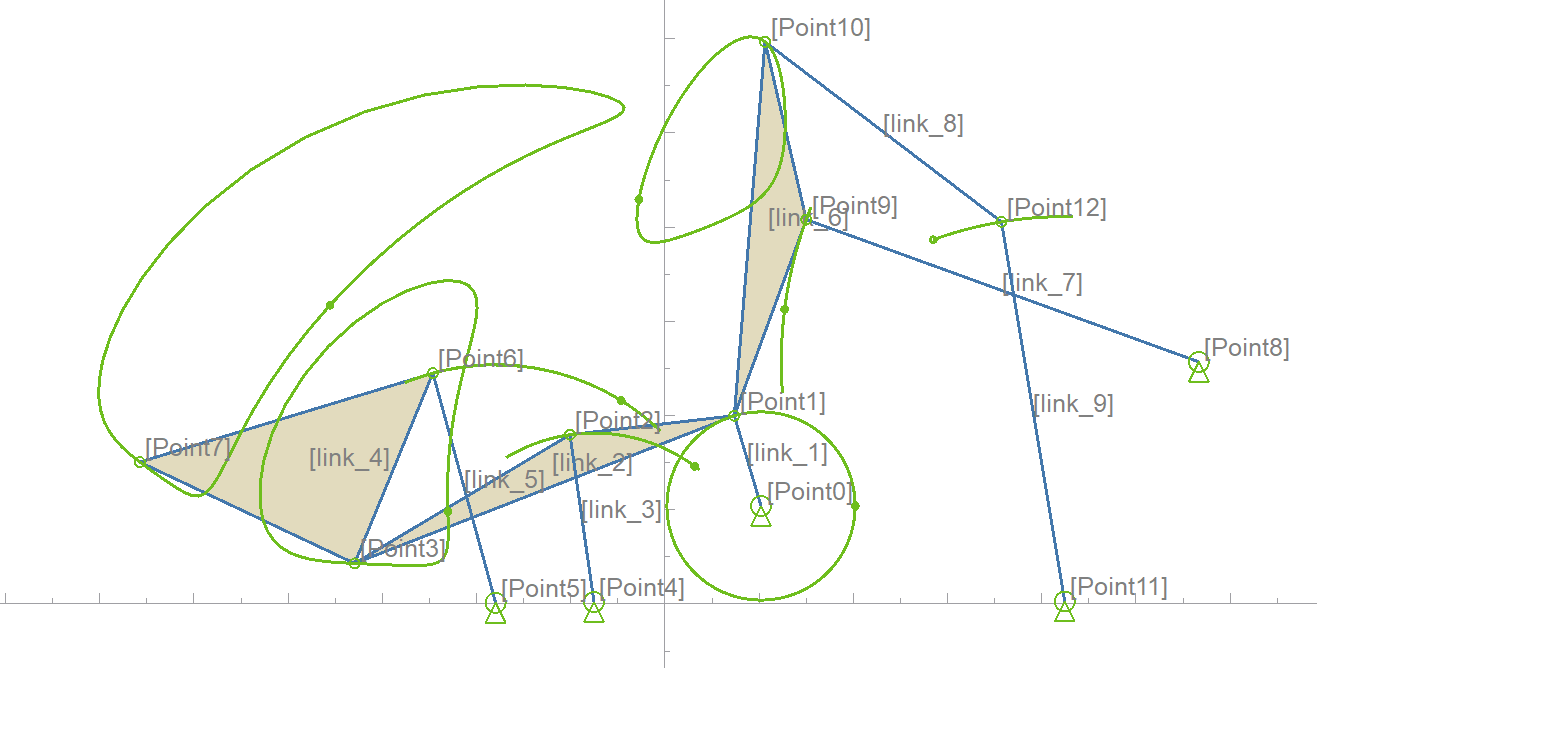
ttt檔案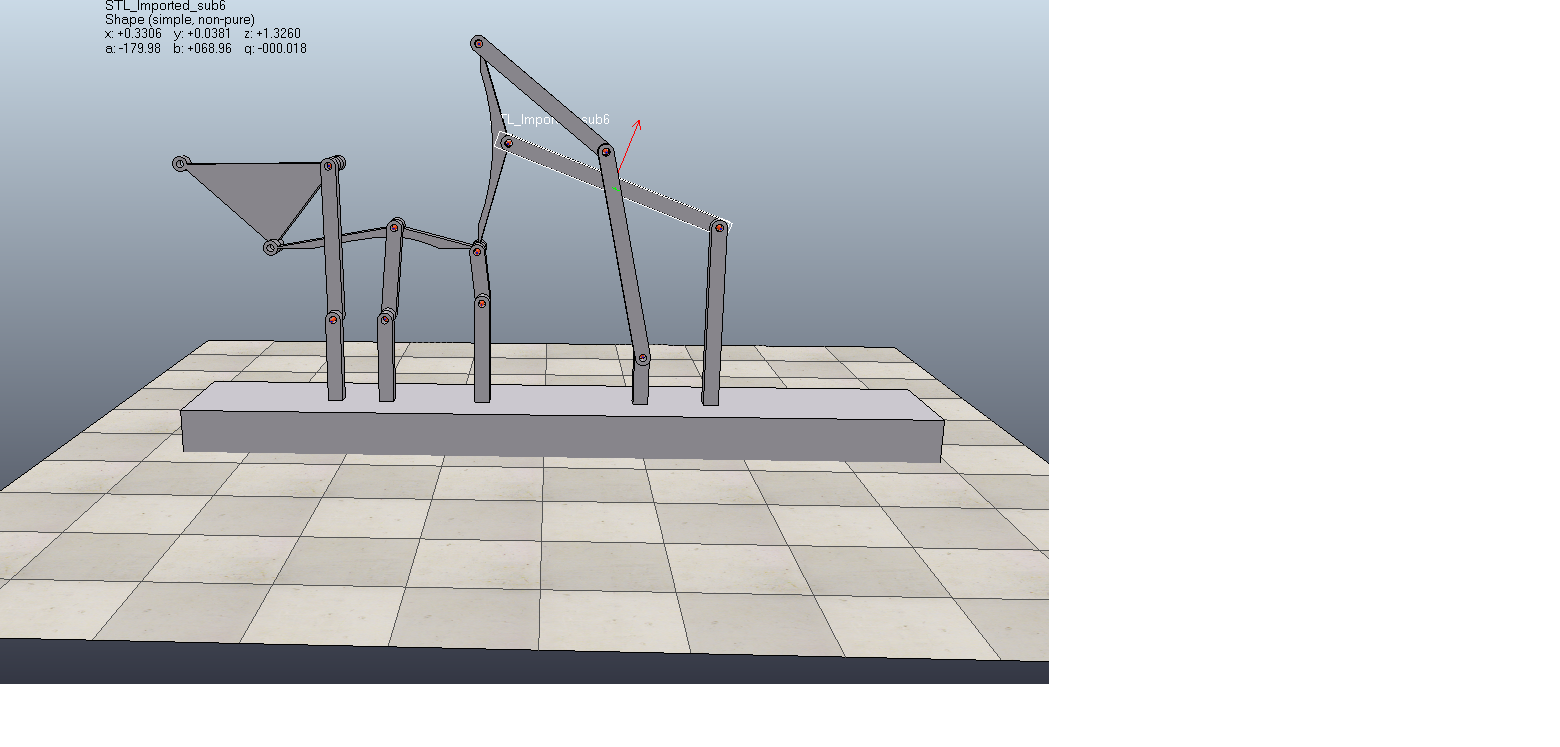
slvs檔案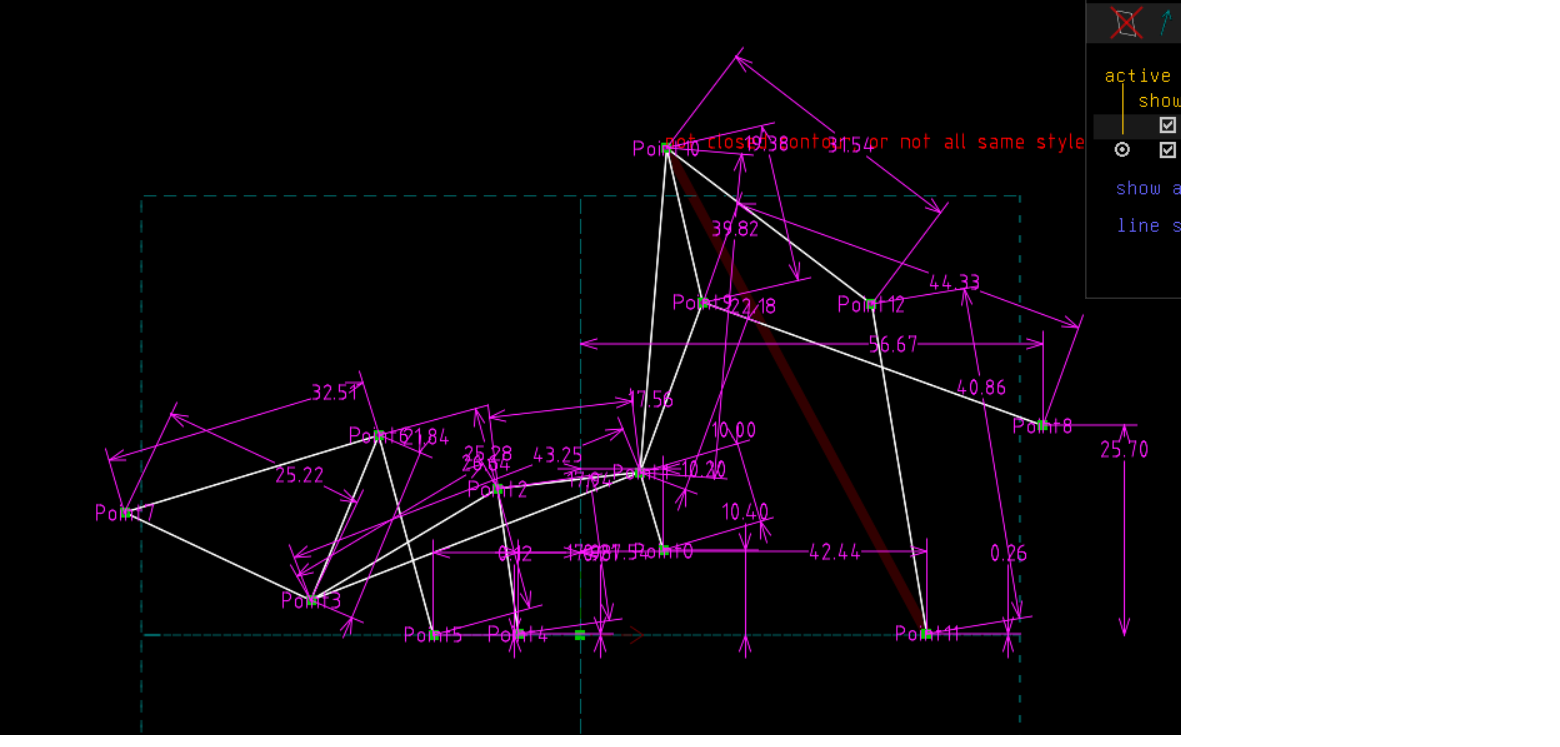
模擬影片(含軌道)


Onshape連結
小組心得:
每一個禮拜的難度都在增加 , 對我們來說都是挑戰 , 而這次的連桿機構比照之前所學的有稍微難一點 , 要使用雙階段提球機構達到至少兩次循環 , 我們目前操作上有些許的障礙需要排除(已解決)。
)